本手册用于验证CAN的高电平信号和CAN信号的低电平是否正确传输到总线连接。
使用电缆
多功能电缆
验证说明
- 电压测试(示波器):要检查电压,必须连接电池并打开点火开关。
- 电阻测量:测量电阻时,测量前必须将待测物体断电。 为此,电池已断开连接。 等待3分钟,让系统中的所有电容器放电。
CAN信息
CAN总线(控制器区域网络)是一种串行总线系统,具有以下功能:
- 信号传播在两个方向上发生。
- 所有总线用户都收到每条消息。 每个总线用户决定他是否会使用该消息,
- 通过简单的并行连接添加额外的总线用户。
- 总线系统与驱动器形成系统。 每个总线用户可以是驱动器或执行器,具体取决于它是作为发送器还是接收器连接。
- 双线连接用作传输介质。 电线名称:CAN低电平和CAN高电平。
- 通常,每个总线用户可以通过总线与所有其他总线用户通信。 总线上的数据交换受访问规则的约束。 K-CAN数据总线(车身CAN总线),PT-CAN总线(发动机和变速箱CAN总线)与F-CAN总线(机箱CAN总线)之间的主要区别是:
- K-CAN:数据传输速率约。 100 Kbps 单线可能。
- PT-CAN:数据传输速率约。 500 Kbps 单线模式是不可能的。
- F-CAN:数据传输速率约。 500 Kbps 单线模式是不可能的。
驱动程序:驱动程序是通信计划源自的活动通信伙伴。 驱动程序优先并控制通信。 它可以通过总线系统向无源总线用户(执行器)发送消息,并根据请求接收其消息。
执行器:执行器是被动通信成员。 它接收接收和发送数据的命令。
具有主设备的系统:在具有主设备的系统中,通信参与者可以在某个时间点承担主设备或致动器的角色。
K-CAN,PT-CAN,F-CAN的示波器
为了更清晰,CAN总线是否完美运行,您需要观察总线通信。 同时,无需分析各个位,您只需要确保CAN总线正常工作。 示波器显示:“CAN总线显然可以无干扰地工作”。
使用电压示波器测量时,CAN(或高CAN-High)低电平线和地接收电压范围内的方波信号:
K-CAN:
相对于质量的低CAN水平:U min = 1 V且U max = 5 V.
相对于质量的高CAN水平:U min = 0 V且U max = 4 V.
这些值是近似值,可能会根据总线负载而变化,最高可达100 mV。
用于K-CAN测量的示波器设置:
CH1:探针1,等级2 B / div; DC DC2连接:探头2,2级V / div; 直流连接时间:50 ms / div
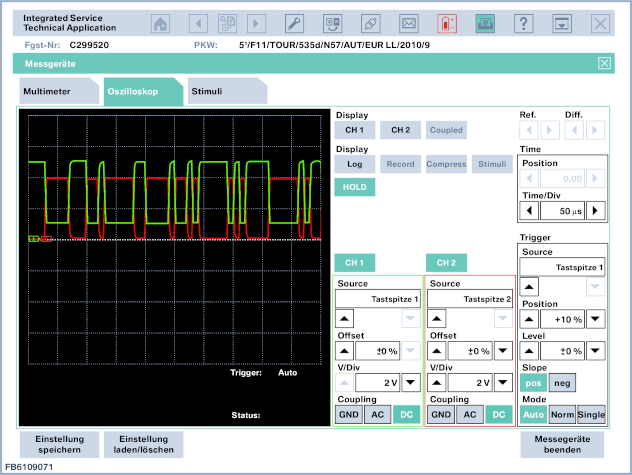
图。 1:K-CAN测量:CH1低CAN级,CH2高CAN级
使用电压示波器测量时,CAN(或高CAN-High)低电平线和地接收电压范围内的方波信号:
PT-CAN和F-CAN
相对于质量的低CAN水平:U min = 1.5 V且U max = 2.5 V.
相对于质量的高CAN水平:U min = 2.5 V且U max = 3.5 V.
这些值是近似值,可能会根据总线负载而变化,最高可达100 mV。
PT-CAN(或F-CAN)测量的示波器设置:
CH1:探针1,等级1 B / div; DC DC2连接:探头2,1级V / div; 直流连接时间:10 ms / div 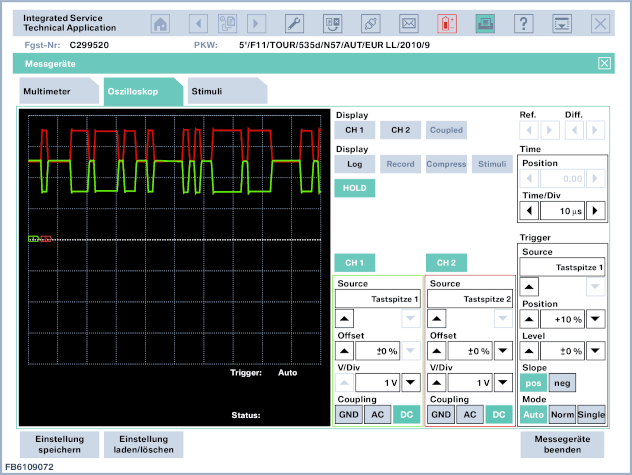
图2:PT-CAN测量:CH1低CAN,CH2高CAN
具有匹配电阻K-CAN,PT-CAN和F-CAN的电阻测量指令
检查电阻测量的过程:
- CAN总线必须断电
- 不应连接其他测量设备(测量设备的并联)
- 测量在CAN低电平和CAN高电平线之间进行。
- 实际值可能与指定值相差几欧姆。
K-CAN
不能在K-CAN总线上进行单独的电阻测量,因为电阻会根据计算机的开关逻辑而变化!
PT-CAN,F-CAN
为了防止信号反射,两个CAN总线用户(在PT-CAN网络中具有最大距离)加载120欧姆的电阻。 两个负载电阻并联连接,形成60欧姆的等效电阻。 在电源电压断开的情况下,可以在数据线之间测量该等效电阻。 此外,可以单独测量各个电阻。
电阻为60欧姆的测量说明:断开易于接近的计算机与轮胎的连接。 测量低和高CAN线之间连接器的电阻。
注意!
并非所有车辆都在CAN总线上有终端电阻。可以使用相应的接线图检查所连接车辆上是否存在内置终端电阻。
CAN总线无法正常工作
如果K-CAN或PT-CAN数据总线不工作,则可能存在短路或高或低CAN线损坏。 或者故障的ECU。
要定位故障原因,建议按以下步骤操作:
- 依次断开CAN总线用户,直到找到导致故障的块(= ECU X)。
- 检查计算机X的电缆是否短路或开路。
- 如果可能,检查ECU X.
- 只有当短路具有从计算机到CAN总线的可验证电线时,这样的一系列动作才能成功。 如果CAN总线中的导线本身短路,则需要检查线束。
我们保留打印错误,语义错误和技术更改的权利。